2018 i bought two small RTK Modules to build a ROVER/BASE GPS System for accurate Rover navigation.
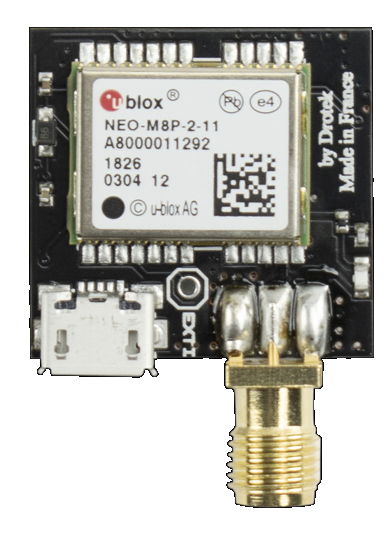
Tiny RTK Receiver image from drotek
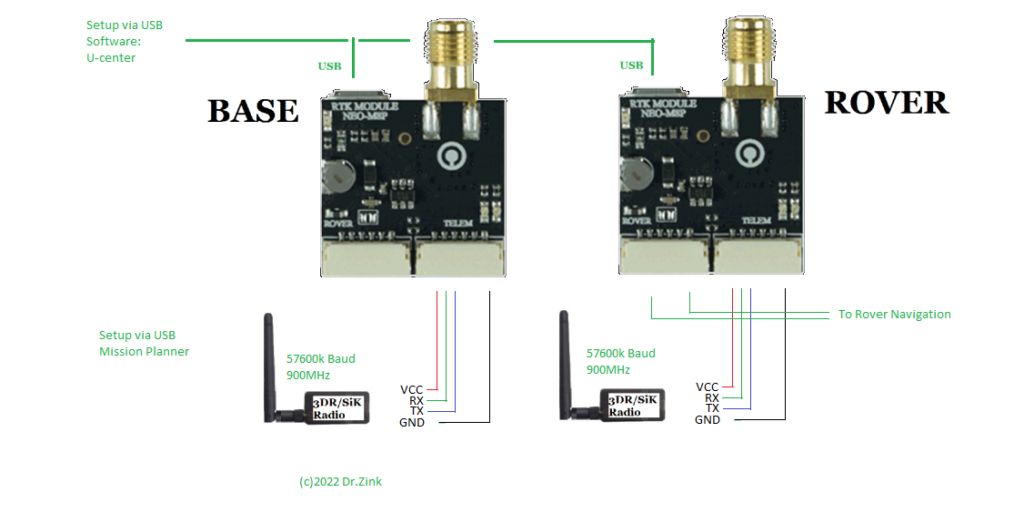
Unfortunately i never managed to make them work correctly . In 2022 i tried again. Here is my Setup.
During the experiments i found these prerequisites very helpful:
- Do not try to setup with a notebook in the field
- Use latets u-center version from U-ubloxx site
- Flash latest firmware: Attn: use flash definition file from program files folder.
- Locate both Antennas outside. Find good viewing conditions, and prepare the Antennas for a long time setup: protect from Rain/Wind.
- Prepare the Wireless Serial Link for the Base/Rover connection. I used Q-Ground Control to prepare the two wireless modules. I suggest to use modules with micro-USB Connector AND JST-Connector. This simplifies Setup via Computer. I adjusted baudrate to 57600 and set a channel identical on both units. So the serial link between both Modules is also set to 57600 baud.
- I used a separate USB Power Supply for the ROVER Wireless receiver. I had issues with Power Supply via the Tiny RTK !
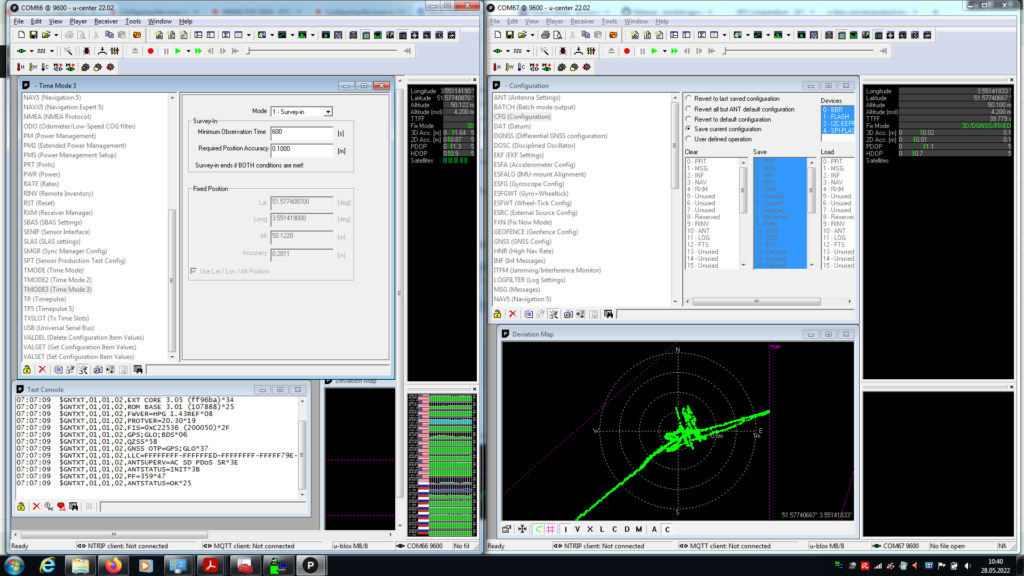
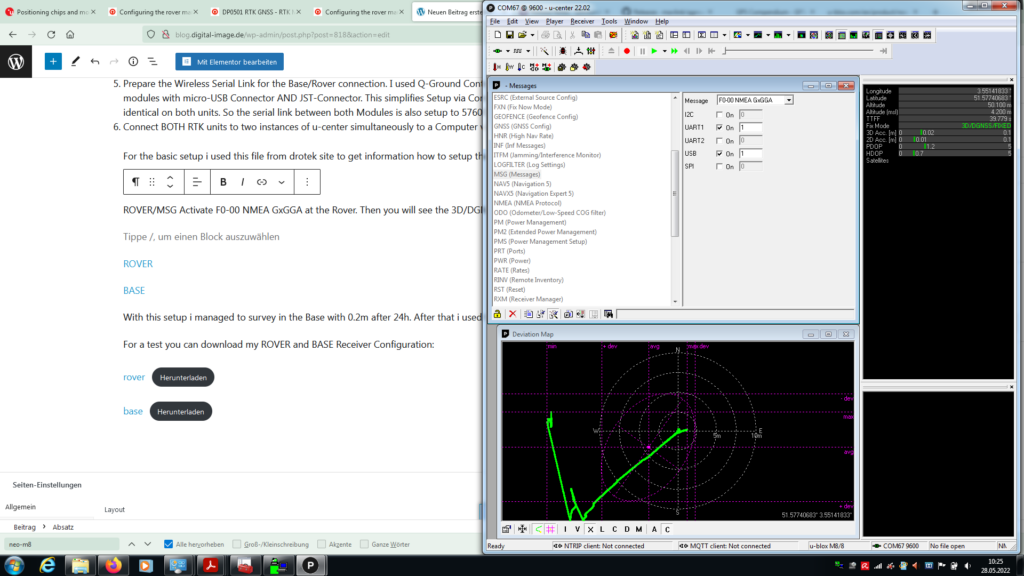
- Connect BOTH RTK units to two instances of u-center simultaneously to a Computer via serial USB connection to make all the settings.
For the basic setup i used this file from drotek site to get information how to setup the base and rover:
What is missing in this Files is :
ROVER/MSG Activate F0-00 NMEA GxGGA at the Rover. Then you will see the 3D/DGNSS/FIXED Message. (upper right in green)
Manuals from Drotek:
With this setup i managed to survey in the Base with 0.2m after 24h. After that i used this as fixed configuration to speed up setup time.
For a test you can download my ROVER and BASE Receiver Configuration:
Finally i got a fixed solution. This was new to me 😉
Unfortunately this worked only while the rover is not moving. If i moved the rover antenna the fixed result is lost immediately and the float result starts to vary about 1m. So i tried to use only a float (DGNSS Setting =3) solution. But also this did not help.
Skyhorsetech Setup
So i started looking for further information and found the skyhorsetech site about the newer Series 9 Receivers.
In this article there is also information sent back to the base.


I tried this and results slightly improved: i could move the rover and for a while, but not much.
Now i ordered two professional antennas from drotek.
Mission Planner
I also tried the configuration via mission planner. Since my setup consists only of two Tiny-RTK Modules and a radio link, the Rover was not identified – i assume it wants to see a ardupilot. The mission planner sets the baud rate to 100MBit, whereas i used 57600k Baud. Chaned that, the sattelite view in u-center only appeared for a fraction of a second, to dissapear again. So i was not very happy with that and resumed to skyhorsetech setup.
Drotek
I asked drotek for base/rover files.
Drotek answers to send :
Base
| RTCM1074 | RTCM1084 | RTCM1094 | RTCM1114 | RTCM1124 |
and Message 1230.
Protocol in/out : 5-RTCM3
Rover:
Protocol in 5, out: 0+1+UBX+NMEA
Drotek Support for M8-P:
I contacted Drotek support and their help was very good.
They suggested to disable messages 1077, 1087, 1097, & 1127.
After that I the situation got better and the Rover got 3D/DGNSS/FLOAT and FIX much faster.
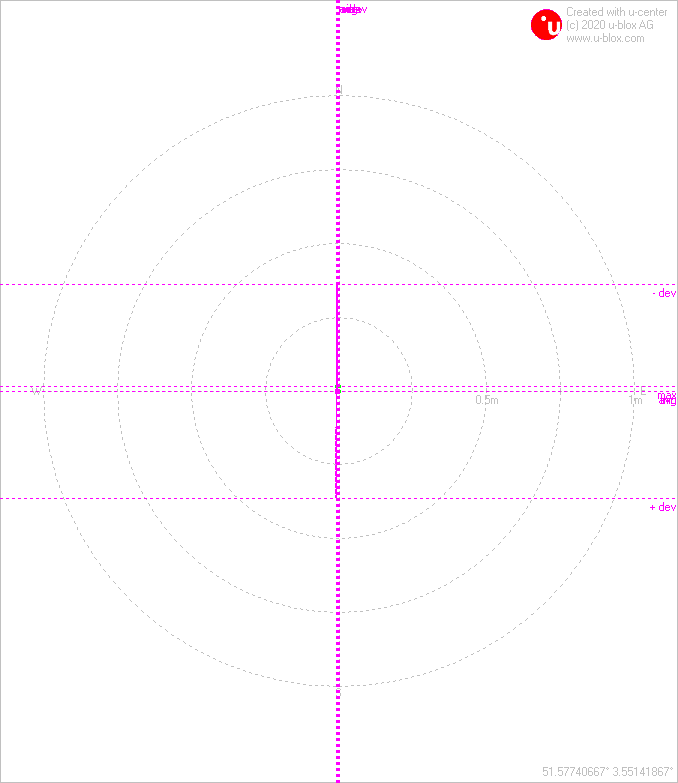
But I still experienced Errors of „jumpy“ positions if I move the rover Antenna. In the picture the Position is kept fix and antenna moved by 30 cm on a line. You can see that after a while the position „jumps“ to other values. At first I got two new Antennas from Drotek. The Base Antenna DA910 looks very promising and increased Signal Levels. Also the Rover Antenna looks much better than Unity bought via Internet..
Step by Step the situation slightly improves.

But still the positions jumped when the Rover Antenna moved…
So we disabled the Telemetry transmitters. To route the RTK Signal between the Tiny GPS there are different options:
- First you can solder a RX/TX Cable. The second option is to connect both Tiny-GPS Units to the PC and transfer the RTK Data via Serial Port. You connect the ROVER with the U-Center and enter the BASE Serial Adress in Receiver/Differential GNSS Interface.
Now the Rover Position kept „fix“ though I moved the Antenna, and the „jumps“ disappeared.
I have to fix the Telemetry now.
Finally I reduced the Power of the Telemetry link to 3 instead of 20. This seems to eliminate disturbance of the Rover GPS.
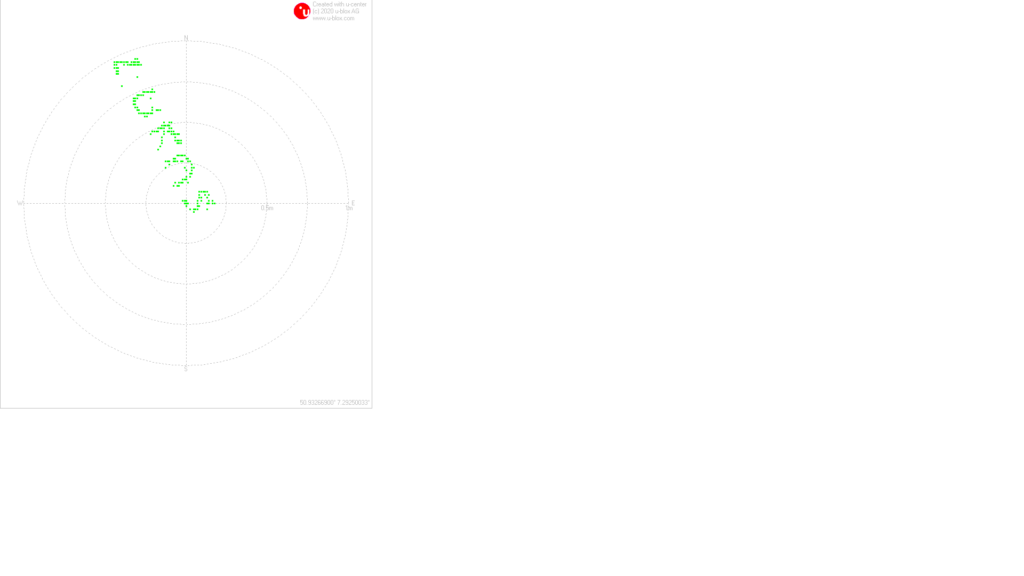
So I could write my Sons Name with the Rover GPS Antenna..
Thanks Drotek